
Pour mon projet AutoBot, je veux que mon robot mobile, dans un premier temps, se déplace de manière autonome et sans percuter d'objets. Il faut donc mettre en œuvre des capteurs pour que le robot prenne conscience de l'environnement à proximité de lui.
Pour cela, il existe les télémètres. Cette grande famille, souvent utilisée en robotique, se partage en deux grandes parties :
- Télémètre infrarouge
- Télémètre ultrason
Quel que soit le type de télémètre, le principe reste le même. Le capteur est composé de 2 parties, une émettrice et l'autre réceptrice. La première partie va donc émettre une "onde" qui sera réfléchie par les objets. "L'onde" sera perçue par le récepteur qui fournira une information sur la distance entre capteur et objet.

1.2- Infrarouge :
L'un des télémètres qui m'intéresse est le SHARP "GP2Y0A02YK".

1. données
2. masse
3. alimentation
Mais surtout, un abaque très clair.

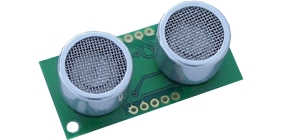
1.2- Ultrason :
Dans cette gamme, les plus connus sont les "SRF04" ou le "SRF05".

Le code, repris de la page citée au-dessus.
La division par 58 permet d'obtenir la distance en "cm". Il est possible de l'avoir en "inches" en divisant par 148.// include the library code:#include <LiquidCrystal.h>#define echoPin 6 // the SRF05's echo pin#define initPin 7 // the SRF05's init pinunsignedlongpulseTime = 0;// variable for reading the pulse// initialize the library with the numbers of the interface pinsLiquidCrystal lcd(12, 11, 5, 4, 3, 2);voidsetup() {// set up the LCD's number of rows and columns:lcd.begin(16, 2);// make the init pin an output:pinMode(initPin, OUTPUT);// make the echo pin an input:pinMode(echoPin, INPUT);}voidloop() {digitalWrite(initPin, HIGH);delayMicroseconds(10);digitalWrite(initPin, LOW);pulseTime = pulseIn(echoPin, HIGH);lcd.setCursor(0,0);lcd.print(pulseTime / 58, DEC);lcd.print("cm");delay(100);lcd.clear();}
Aucun commentaire:
Enregistrer un commentaire