
1. Présentation
La "CNC shield" a été conçue de manière à pouvoir piloter jusqu'à 4 moteurs pas-à-pas en utilisant d'un Arduino Uno ou Mega.

2. Principe de câblage (simple)
Présentation d'un câblage simple de moteur pas-à-pas sur la "CNC shield".

Il faudra vérifier le code couleur du bornier du moteur pas-à-pas afin de connecter convenablement les enroulements sous peine de ne pas pouvoir faire tourner le moteur..
3. Position des cavaliers (jumpers)
Les cavaliers sont utilisés pour la configuration du quatrième axe, du micro pas-à-pas et de la gestion de la butée.
- Configuration du quatrième axe
À l'aide de deux cavaliers, le 4ème axe peut être configuré pour cloner l'axe "X", "Y" ou "Z". Il peut également fonctionner comme un axe individuel en utilisant la broche numérique '12' pour le signal pas à pas et la broche numérique '13' comme signal de direction.

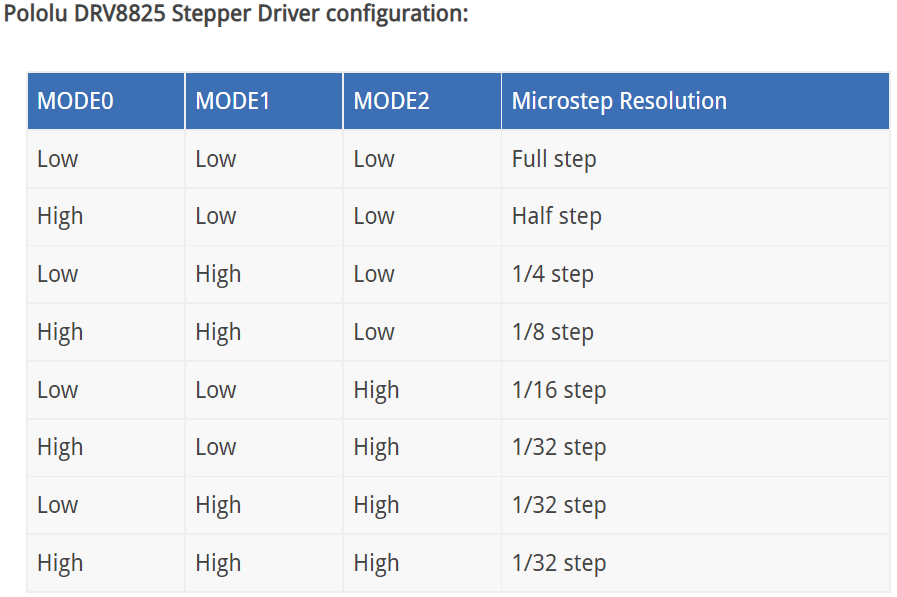
- Configuration du micro pas à pas pour chaque axe
Chaque axe dispose de '3' cavaliers qui peuvent être réglés pour configurer le micro pas pour l'axe.
Dans les tableaux ci-dessous, High indique qu'un cavalier est inséré et Low indique qu'aucun cavalier n'est inséré.

Attention : différents types de drivers existent. Les plus courants sont le "A4988" et le "DRV8825".
- DRV8825 : Courant admis jusqu'à 1.5A sans refroidissement, 2.2A avec un refroidissement très efficace (radiateur + ventilateur).
- A4988 : Courant admis 1.2A avec refroidissement, et 2A avec un refroidissement efficace (radiateur).
- DRV8825 : Courant admis jusqu'à 1.5A sans refroidissement, 2.2A avec un refroidissement très efficace (radiateur + ventilateur).
- A4988 : Courant admis 1.2A avec refroidissement, et 2A avec un refroidissement efficace (radiateur).

4. Réglage de la limite de courant (tension de référence "Vref") pour le driver pas à pas
La tension de référence est ajustée avec un petit tournevis au niveau du potentiomètre situé sur chaque "drivers". Il est recommandé d'ajuster la tension de référence (Vref) par petits incréments (1/4 tour). Pour commencer, il faut régler le courant maximum sur 1A. Si le moteur surchauffe, il faudra réduire la consigne "Vref". Au contraire, si le moteur ne bouge pas ou rate des pas, il faudra augmenter la consigne "Vref".
5. Dissipateur thermique pour driver
Pour éviter la dégradation du "driver", il est recommandé de placer des dissipateurs sur le composant. Cela permettra de le protéger lors de l'échauffement générer par son utilisation. Attention de bien placer le dissipateur ; ce dernier, ne doit être en contact avec rien d'autre que le "driver".

6. Positionnement du driver sur le 'shield'
Pour placer le "driver" sur le "shield", il suffit de repérer les broches "Enable" pour les enficher.

Attention : Bien vérifier les tensions d'alimentation tolérables par les divers composants utilisés.

